מהו רובוט תעשייתי
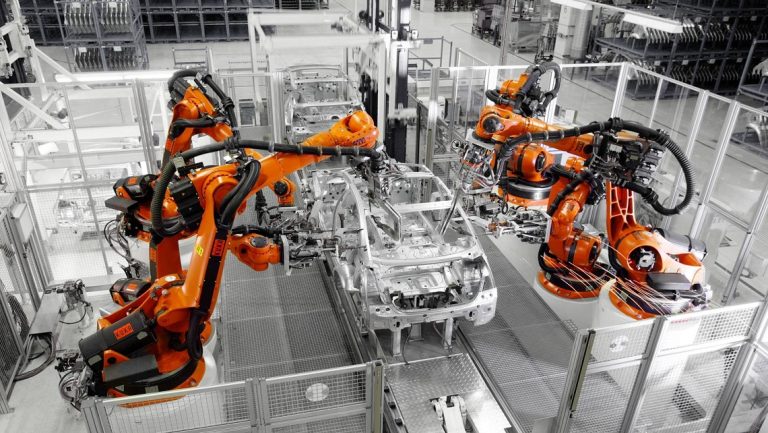
רובוט תעשייתי זוהי מערכת עם זרועות רובוטיות שיכולות לנוע למספר כיוונים. וניתן לתכנת אותן לביצוע משימות מסוגים שונים ומרובים ובסביבות עבודה שונות. הרובוטים התעשייתיים האלה יכולים לעבוד:
- בסביבות משתנות כמו תאי לחץ גבוה ואקום.
- בחדרי עבודה נקיים ובאזורים מלוכלכים להחריד.
- באזורים מסוכנים בהם קיימים איומי פיצוצים, זיהומים, קרינה או סכנות קיצוניות אחרות ומסוכנים לבני אדם.
זרועות רובוטיות יכולות להיות מצוידות בגריפרים מיוחדים לעבודה עם חפצים עדינים ושבירים. בעוד שבזרועות רובוטיות אחרות יכולים להיות גריפרים שיכולים לתפוס ולהרים משקל של מספר טונות.
סוגי עבודה לרובוטים
זרועות רובוטיות יכולות להיות מצוידות בכל סוג של כלי עבודה. כלים אלה משמשים בדיוק, דיוק, מהירות וחזרתיות שלא יכולים להשתוות בני אדם.
לזרועות הרובוטיות הללו יכולות להיות מספר רב של חיישנים ומערכות ראייה המסוגלות לצפות בתמונות ממוחשבות. כדי לסייע בשליטה המבוססת על מחשב. ניתן להשתמש במשוב של חיישן ו Vision עם אינטליגנציה מלאכותית לקבלת החלטות לגבי התנהגות הזרוע הרובוטית. רובוטים תעשייתיים ואוטומציה הם חלק חשוב בייצור רוב המוצרים המיוצרים בעולם של היום.
פעולות הרובוט מכוונות על ידי שילוב של תוכנות תכנות ובקרות. הפונקציונליות האוטומטית שלהם מאפשרת להם לפעול מסביב לשעון ובסופי שבוע – כמו גם עם חומרים מסוכנים ובסביבות מאתגרות – לשחרר עובדים לבצע משימות אחרות. הטכנולוגיה הרובוטית גם מגבירה את הפרודוקטיביות והרווחיות תוך ביטול פעילויות עתירות עבודה שעלולות לגרום למאמץ פיזי או לפגיעה פוטנציאלית בעובדים.
הרכיבים העיקריים של רובוטים תעשייתיים
ארבעת החלקים העיקריים של רובוט תעשייתי הם הזרוע, הבקר, מכשיר ה Teach Pendant ומערכת החשמל.
לזרוע יש בקר שהוא “המוח” של המערכת. הבקר מחזיק את קוד התכנות ומקבל אותות מהמערכת (קלט), מעבד את האותות ולאחר מכן שולח אותות החוצה למערכת (פלט) כדי לשלוט ברובוט.
סוג קלט אחד עשוי להגיע ממכשיר הממשק האנושי, כגון תליון ללמד. ניתן להשתמש במכשירים אלה לתכנת הזרוע ולשלוט בתנועתה.
המרכיב האחרון הוא ספק הכוח שבו הרובוט התעשייתי מקבל את האנרגיה שלו לבקר והמפעילים שלו. זה בדרך כלל בצורה של אנרגיה חשמלית.